【Zynq7】3.Linuxカーネルの構築
1.記事一覧
記事は複数回に分けて投稿します。Zynq7020SoCで動作する、YoctoベースのPetaLinuxを使わない素のLinuxを構築します。
エッジArm Linux構築編(armv7l)
- 【Zynq7】Yoctoを使わずに素のLinuxをソースから構築する
- 【Zynq7】1.FSBL(1stStageBootLoader)の構築
- 【Zynq7】2.U-bootの構築
- 【Zynq7】3.Linuxカーネルの構築 ←本ページ
- 【Zynq7】4.Zyboz7ボードのデバイスツリー構築
- 【Zynq7】5.RootFSのマウント(Ubuntu18.04)
- 【Zynq7】6.カーネルモジュールの配置
- 【Zynq7】番外編1.u-bootが途中で止まる問題
- 【Zynq7】番外編2.MACアドレスをQSPIFlashから読み出して設定する
エッジArm Linux実践編(armv7l)
- 【Zynq7】実践1. LinuxにRTCを認識させる【I2Cデバイス】
- 【Zynq7】実践2. 温度センサをPython+Dockerで使う【I2Cデバイス】
- 【Zynq7】実践3. 組込みLinuxでコンテナ導入に苦労した話【Docker Engine編】
- 【Zynq7】実践4. LinuxでSPIを使う【液晶編1】
- 【Zynq7】実践5. ZynqPLのGPIOをLinuxで使う【液晶編2】
- 【Zynq7】実践6. PythonでSPI液晶を使う【液晶編3】
- 【Zynq7】閑話. SPI バス周波数が上がらない問題
2.目次
この記事ではlinuxの構築を行い、カーネルイメージ(uImage)ファイルを生成します。
uImageは起動用SDカードのbootパーティションに配置されます。
- 1.記事一覧
- 2.目次
- 3.環境
- 4.ビルド環境の構築
- 5.Linuxカーネルのmenuconfig設定
- 6.Linuxカーネルのビルド
- 7.最後に
3.環境
| 開発PC | Ubuntu20.04, intel core i5 750 RAM 16G |
| Docker | Docker Engine v23.0.0, Ubuntu20.04 base image 【追記2023/5】Ubuntu22.04 Docker imageでLinuxカーネルビルドに失敗することがありました。原因は20.04→22.04でarm-linux-gnueabihf-gccがver9→ver11 に変わり、armv7hf gccの仕様が変わったかららしいです。 Linux kernel v6.1(tag=xilinx-v2023.1)ではgcc11でビルドできました。 |
| ターゲットボード | Digilent Zybo z7-20 Rev.B.2(XC7Z020-1CLG400C, DDR3 1GB) |
| Linuxカーネル | XilinxがGitHubで提供するソースコード tag=xilinx-v2022.2 Linux kernel v5.15 https://github.com/Xilinx/linux-xlnx/tree/xilinx-v2022.2 |
| mkimage | ubootに対応したLinuxカーネルイメージを生成するツール XilinxがGithubで提供するソースを使用。tag=xilinx-v2022.2 u-boot 2022.01 https://github.com/Xilinx/u-boot-xlnx/tree/xilinx-v2022.2 |
u-boot構築に引き続き、Linuxカーネルのビルド環境にはDockerコンテナ環境を使用します。理由は私の開発PCではすでに別の開発環境が入っており、クリーンでないからです。再現性を高めるためなので、必ずしも使う必要はなく、直接開発PC上に環境構築しても問題ありません。
4.ビルド環境の構築
前記事のu-bootの構築で使用した、Dockerコンテナ環境を使用します。
4-1. mkimageのインストール
前回u-bootのgitリポジトリをcloneしてありますので、そこからmkimageコマンドを持ってきます。
sudo cp ./u-boot-xlnx/tools/mkimage /usr/local/bin/4-2. Linuxカーネルクロスビルド環境変数(zynq7なのでarmv7l)
$ export CROSS_COMPILE=arm-linux-gnueabihf-4-3. libncurses-devのインストール
この後menuconfigによる設定を行う際、画面表示するために必要です。
$ sudo apt install libncurses-dev4-4. bcコマンドのインストール
makeコマンドの内部処理で必要になります。
$ sudo apt install bc5.Linuxカーネルのmenuconfig設定
5-1. Linuxカーネルソースのclone
適当な作業用フォルダを作成し、git cloneします。
$ mkdir linux_wk
$ cd linux_wk
$ git clone https://github.com/Xilinx/linux-xlnx.git -b xilinx-v2022.2 --depth 15-2. menuconfigの起動
まず、zynq標準defconfigで初期化します。
$ cd linux-xlnx
$ make ARCH=arm xilinx_zynq_defconfigmenuconfigを起動します。
$ make ARCH=arm menuconfig以下の画面が表示されます。
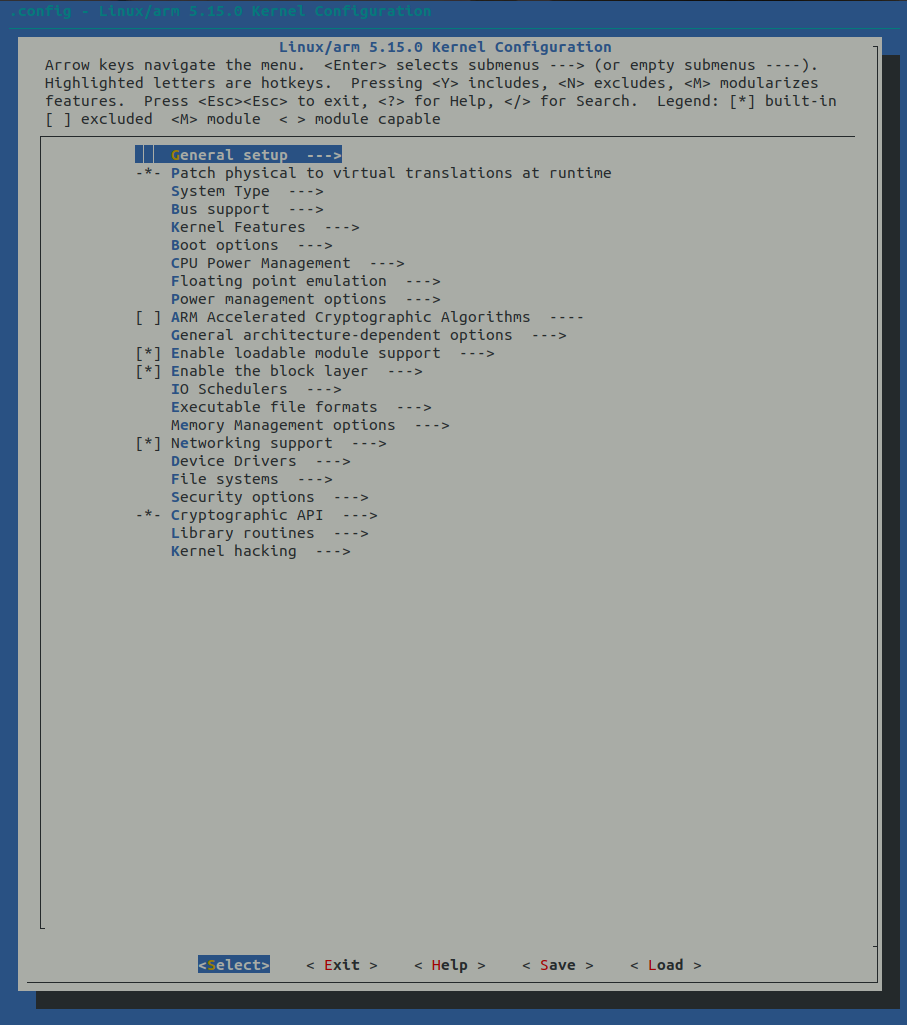
5-3. menuconfigについて
標準defconfigで初期化された後はほとんどのドライバが無効になっているため、必要に応じて有効化します。なひたふ氏の書籍では
- USB-Host、USB-LAN(USB接続EtherのLSI)、USBWifiドングル、USBHubの有効化
- RTC(Real Time Clock)デバイスの有効化
- 画像表示(フレームバッファ)の有効化
といった例を解説されています。今回は各デバイスが用意できず確認できないため、バージョン名を改変とUSB機能周りを有効化して終えます。残りは別の機会に遊んでみます。
また、Linux起動後にSSHでログインを使うためのGigabitEtherはデフォルトで使えます。
5-4. menuconfig操作方法
基本的にキーボード操作です。上下矢印キーでカーソル移動、左右矢印キーで<Select><Exit><Help><Save><Load>を移動します。<Select>でEnterを押すと選択されているカーソル項目の中の階層に入ります。<Exit>でEnterで上の階層に戻ります。
半角スペースキーで項目の有効(*)/無効( )/ローダブルモジュール(M)の3つを切り替えます。有効は組込みモジュール、ローダブルモジュールは必要になったときのみ読み込むモジュールです。
5-5. カーネルバージョン名の変更
General setup>Local versionを選択し、製品名などに書き換えることができます。
今回は適当に"-zyboz7_custom"に変えておきます。
最後はトップ階層で<Exit>でデータ保存をyesにします。保存データの.configはlinux-xlnx/.configにあります。
5-6. USB機能の有効化
DeviceDriver > USB Support > USB announce new devicesを有効(*)にします。
DeviceDriver > USB Support > OTG supportを有効(*)にします。
それと私個人的にUSBシリアルデバイスでマイコン間通信しようと考えているので、
以下をカーネルイメージに組込みます。
DeviceDriver > USB Support > USB Serial Converter support を有効(*)して中に入る
DeviceDriver > USB Support > USB Serial Converter support >
USB Generic Serial Driverを有効(*)
USB Serial Simple Driverを有効(*)
USB Winchiphead CH341 Single Port Serial Driverを有効(*)
USB CP210x family of UART Bridge Controllersを有効(*)
USB FTDI Single Port Serial Driverを有効(*)
6.Linuxカーネルのビルド
6-1. ビルド実行
linux-xlnxフォルダ直下でビルドを実行します。
時間がかかるので、並列Jobオプション(-j*)をつけて高速化します。開発PCのMAX論理コア数+1個の並列数までにします。私の環境だとMAX -j5になります。
$ make -j5 ARCH=arm UIMAGE_LOADADDR=0x8000 uImage
...
Kernel: arch/arm/boot/uImage is ready #<--ビルド成功ビルドが終わると上記のメッセージが出ます。20分程かかりました。
linux-xlnx/arch/arm/boot/uImageにカーネルイメージができています。
6-2. カーネルイメージの確認
ヘッダ情報を見てみます。
$ mkimage -l uImage
Image Name: Linux-5.15.0-zyboz7_custom
Created: Mon Feb 13 10:12:50 2023
Image Type: ARM Linux Kernel Image (uncompressed)
Data Size: 4598256 Bytes = 4490.48 KiB = 4.39 MiB
Load Address: 00008000
Entry Point: 00008000サイズが4.39MiBですね。作成して初めて気づくことですが、カーネル本体は想像以上にとてもコンパクトです。多くのドライバが無効だからですが、有効ドライバを増やしていくとどのくらい増えるか気になります。
7.最後に
本記事はなひたふ氏の著書「ZYNQで実用的なシステムを構築するための本」を参考に実践した内容です。本記事では一部しか内容を取り上げていません。もっとディープな内容がほしい方は是非買ってみてください。